swiftlift
(spring 2020)
WHAT IS IT?:
SwiftLift is the robot that I designed and fabricated for the 2020 MIT 2.007 Final Competition. The competition is themed after the pachinko game, and points are gained by completing a variety of tasks such as collecting balls, raising the beaver, and spinning the flower.
I designed a cantilever lift mechanism that will achieve my main task, to lift a weighted beaver to a height of 135cm, and complete a variety of other tasks to garner points as well.
Read the full report here on the design and components.
ROLE:
I worked in this class as an individual developer. I was responsible for the end-to-end design and manufacturing of the final pachinko robot.
The first robot I built was a prototype to conduct basic analysis on how to complete the fundamental tasks such as move around, collect balls, and climb hills. I fabricated this out of basic stock material like sheet metal.
For my final robot, I began with design ideation for my selected scoring strategy as well as mathematical analysis of robot design requirements, such as required power and the location of the center of mass. Then I moved into constructing the technical drawing of individual components in CAD. I recently progressed to physical prototyping by machining as well as 3d printing parts, and also began programming the autonomous driving functions in Arduino. After leaving campus (due to COVID-19), I finished a detailed CAD assembly and conducted thorough analysis to ensure the functionality of my robot.
SKILLS:
manufacturing machines (mill, lathe, bandsaw, etc)
2D and 3D modeling (Solidworks)
3D Printing
mechanical analysis
bench level prototyping
design documentation

labeled competition game board

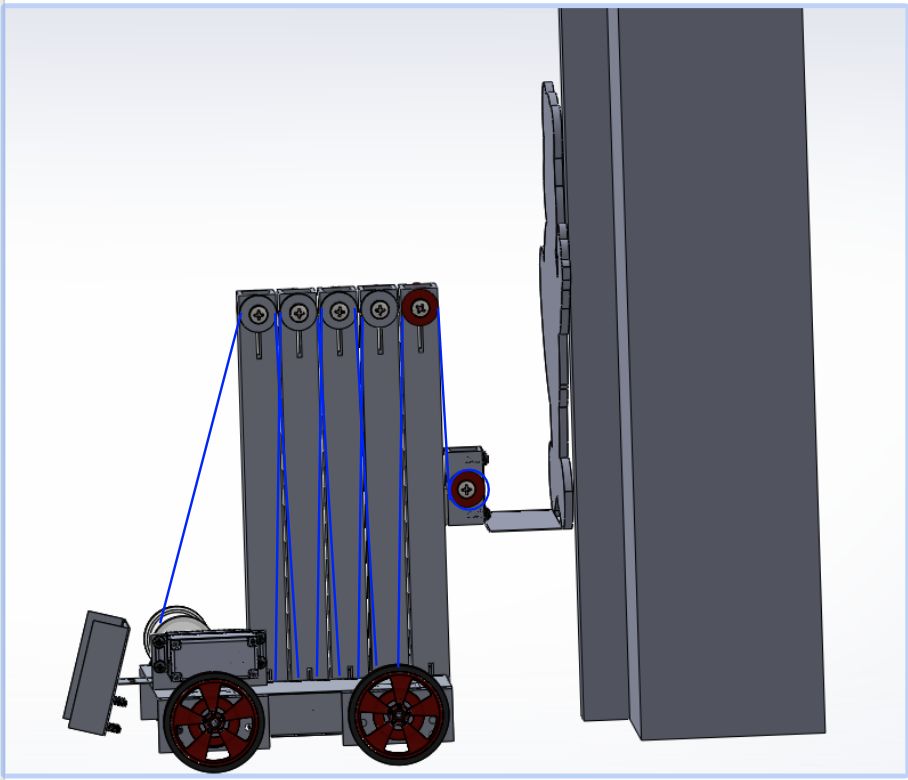
solidworks cad of most critical module
current progress on the lifting mechanism
demonstration of hill climbing and ball collection of prototype
solidworks cad of final robot

robot extending to full height

first prototype